Priority-based scheduling strategies are often used to resolve contentions in resource constrained control systems. Such scheduling strategies inevitably introduce time delays into controls, which may degrade the performance or sabotage the stability of control systems. Considering the coupling between priority assignment and control, we present a novel method to co-design priority assignments and control laws for each control system, which aims to minimize the overall performance degradation caused by contentions. The co-design problem is formulated as a mixed integer optimization problem with a very large search space, rendering difficulty in computing the optimal solution. To solve the problem, we develop a contention-resolving model predictive control method to dynamically assign priorities and compute an optimal control. The priority assignment can be generated using a sample-based approach without excessive demand on computing resources, and all possible priority combinations can be presented by a decision tree. The optimal controls can then be computed iteratively following the order of the generated feasible priorities. The optimal priority assignment and control design can be determined by searching the lowest cost path in the decision tree. With the fundamental assumptions required in real-time scheduling, the solution computed by the contention-resolving model predictive control is proved to be globally optimal.
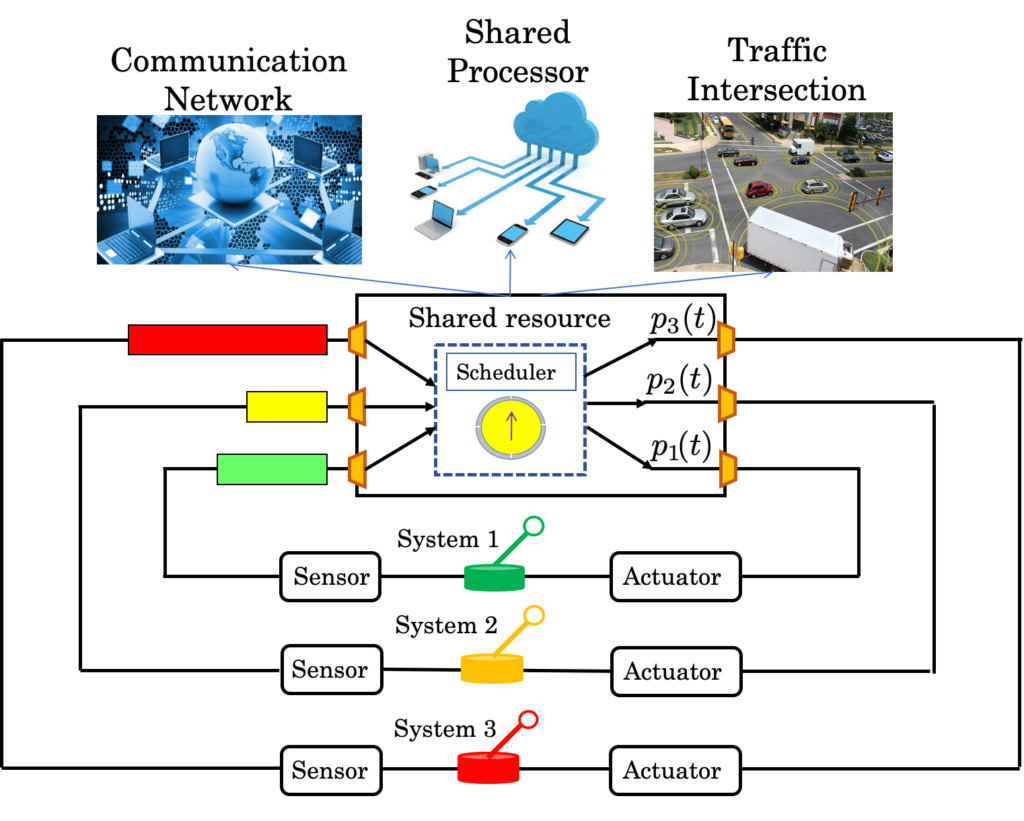
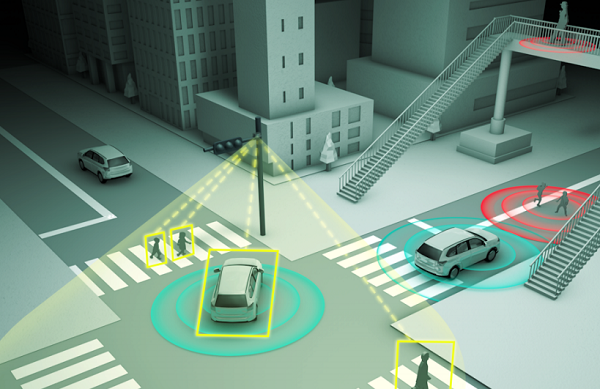
The effectiveness of the presented method is verified through simulation in three real-world applications, which are networked control systems, traffic intersection management systems, and human-robot collaboration systems. The performance of our method is compared with the well-known and most commonly used scheduling methods in these applications and demonstrate significant improvements using our method.